
CloudDesigner is the Laser Scanner application developed by Laser Scanner users.
Full Story
Back in 2013, GESI purchased the best laser scanner on the market, a Z+F 5006h. Despite the large investment of resources, the software purchased to accompany it fell far short of expectations. Data processing times were interminable and procedures were far from rigorous.
In order to work within decent timing, for technical reasons and according to the instructions of the software provider, decimation of points was unavoidable. From such decimation poor results came inexorably, as if one tenth of the time had been invested in the campaign, trashing 90% of campaign timing. So the vendor provided GESI with a different software, withdrawing the previous one. At this point, the work seemed faster but not very versatile or accurate since some basic operations were in fact impossible:
- the correct positioning of a plane
- the generation of an orthophoto with foreground and background objects
- the generation of a high-resolution orthophoto
- the parametric definition of the 3D perspective view or of a plane
- the interactive navigation
From the moment we noticed all these limitations, GESI decided to design its own software. After 11 months, the skeleton of CloudDesigner was born, improved over another 13 months of work.
The results, right from the start, were astounding. This software could finish a day’s campaign work with only a corresponding day’s office data processing and with only 4 gigs of RAM. Even with cheap laptops, tests were really good.
Thus CloudDesigner went from being a prototype to being, our in-house laser scanner management software, all under GESI’s search & development.
Reasons
Here are the 16 features that GESI researched while investing its resources in creating CloudDesigner:
1. Rototranslation with mediated interpolation of the target center
During the Development and Research phase we happened to identify with confidence that the center of the targets was right in the interspace between two or more points. Not knowing what happened with other software we decided to develop a clear procedure, making it possible to select individually the points that contribute to the geometric average.
2. Rototranslation with improved sphere selection
The spheres that were supplied to us with the Laser Scanner had truncated poles and a marked equator: they were not exactly spheres but they were certainly among the easiest to find commercially. Therefore we decided to support them in some way: we therefore developed a procedure that makes it possible to select an area of the sphere while avoiding the truncated poles and the etched equator. Thanks to this algorithm, the use of partially occluded spheres is also possible.
3. Quick AICP/ICP/Bundle Adjustment
One of the first algorithms we wanted to implement was Bundle Adjustment, since before Cloud Designer we used to perform a specific procedure.
As we could not use ICP with whole clouds (it would require too many resources) we had to subsample the clouds to apply that registration, pull out the matrices from the simplified registered clouds and then manually apply them to the full clouds.
The algorithm we implemented then independently performs subsampling on which to work and applies the results to the actual clouds.
4. Point-based registration of a single cloud from multiple clouds that have already been translated
The “Cloud to Cloud” registration algorithm as implemented in other softwares allowed the simple search for homologous points between clouds. We often found that a single cloud to be registered had references already registered in at least two clouds already registered, so we decided to implement this.
5. Analytical rototranslation with reports
After working a Laser Scanner campaign we often had to determine the overall accuracy of the survey and this was difficult, especially after recording the clouds several times to refine alignments. In Cloud Designer we created a documental area in which there are all the reports generated.
6. Easily visible measurements and notes
We made measurements and notes able to be placed in 3d so that they can always be displayed correctly.
7. Parameterization of 3D Views for overlay with Rendering and photographs
Sometimes a Laser Scanner campaign can be used for photographic support during photosimulation. In this case it is very useful to be able to position the Camera at a specific point, with a specific rotation in space and a given FOV angle. The parameterization of 3D Views as implemented in Cloud Designer solves this need.
8. 3D view with interactive walkthrough
The 3D View and interaction was not easy using various software. We told ourselves that in addition to moving through the scene interactively through panning and orbital rotations, the easiest way to navigate through the scene had to be to center yourself in the position of a scan, turn around, and walk around. This simplicity in movement proved successful on so many occasions.
9. Analytical use of Panoramic Photos
The proper use of Panoramic Photos is really a crucial point for the photorealistic rendering of interactive view scans and output papers.
The procedure involves the selection of homologous points between the Equirectangular view of the scan and the Panoramic Photo. This is why we invested a lot of time in this area of the software: each pair is evaluated by relative error, Maximum, Average and Minimum accuracy is shown.
10. Possibility of multiple mappings for each cloud
Coloring by Panoramic Photos also lends, if desired, to use the process with Thermal or Infrared Cameras.
Having support for multiple mappings means being able to hook up various colorimetry possibilities and select one or the other on occasion.
11. Analytical Management of Projection Plans (management of Euler angles)
One of the crucial points in restitution is the management of Projection Planes.
Not only did we want complete plan management via Euler angles, but we also preferred to have management mechanisms.
12. Horizontal, vertical leveling and determination of the parallelisms of the Plans
13. High resolution in Orthophoto export, with missing pixel interpolation
14. Consistent First and Second Floors in Orthophotos.
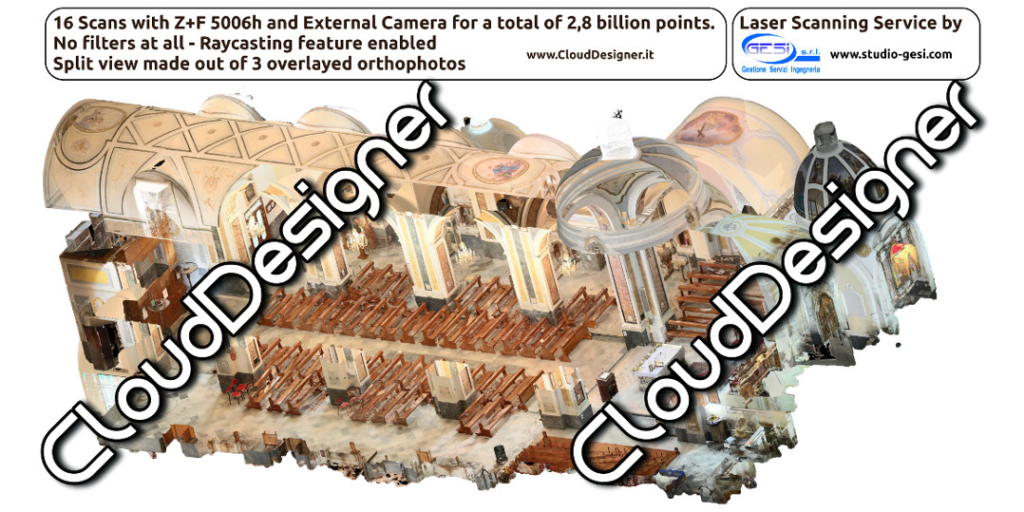
15. Generation of orthophotos even over trillions of points without any subsampling
16. Support for generating Orthophotos from Split-Views and limited sets of points